Zilin Huang

Research Associate
Department of Civil and Environmental Engineering
University of Wisconsin-Madison
Office: Engineering Hall 1217
Email: zilin.huang@wisc.edu
Hi, thanks for stopping by! ![]()
I am currently a Research Associate at the ![]() University of Wisconsin-Madison, and a Visiting Research Associate at the
University of Wisconsin-Madison, and a Visiting Research Associate at the ![]() Purdue University.
I am a founding member of
Purdue University.
I am a founding member of ![]() Sky-Lab.
I am also affiliated with the
Sky-Lab.
I am also affiliated with the ![]() Center for Connected and Automated Transportation (CCAT), the
Center for Connected and Automated Transportation (CCAT), the ![]() Smart Highway Research Center (SHRC), and the
Smart Highway Research Center (SHRC), and the ![]() Tribal and Rural Autonomous Vehicles for Efficiency, Livability and Safety (TRAVELS) Center.
I received my Ph.D. and M.S. degrees from the University of Wisconsin-Madison, advised by Prof. Sikai (Sky) Chen.
Before joining UW-Madison, I worked with Prof. Samuel Labi at Purdue University. I have a strong passion for translating technical findings into practical applications. Prior to my Ph.D. studies, I founded two technology companies in China.
Tribal and Rural Autonomous Vehicles for Efficiency, Livability and Safety (TRAVELS) Center.
I received my Ph.D. and M.S. degrees from the University of Wisconsin-Madison, advised by Prof. Sikai (Sky) Chen.
Before joining UW-Madison, I worked with Prof. Samuel Labi at Purdue University. I have a strong passion for translating technical findings into practical applications. Prior to my Ph.D. studies, I founded two technology companies in China.
📢 I am on the 2026-2027 job market !
Research Statement
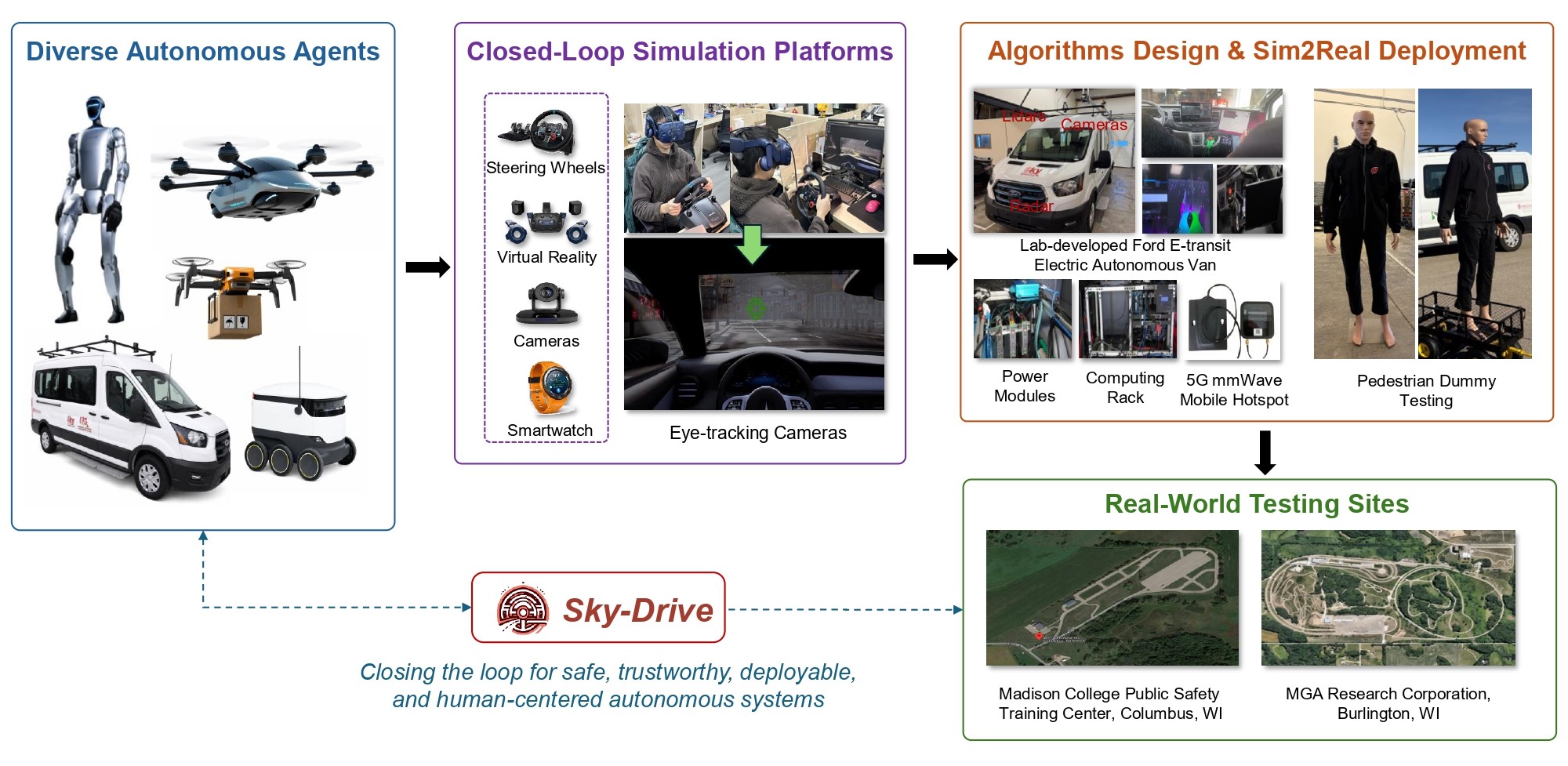
My research sits at the intersection of embodied intelligence, physical AI, and human-centered transportation systems. I envision future mobility environments as human-robot-society ecosystems, where humans coexist, interact, and collaborate with diverse autonomous agents (e.g., autonomous vehicles, delivery robots, drones, and flying vehicles) in the physical world. These agents must understand complex environments, make safe decisions, adapt to human preferences and social norms, and remain reliable under open-world uncertainty.
Building on this vision, my research aims to develop Human-centered and trustworthy autonomous (HEART) systems that enable autonomous agents to operate safely with, alongside, and around humans. This agenda is driven by three key research questions: 1) how can we develop closed-loop simulation platforms that support the unified modeling of humans and diverse autonomous agents with realistic physical and social interactions? 2) how can we design algorithms that enable agents to understand complex environments, reason about actions, and make safe, socially compliant, and reliable decisions? 3) how can we transfer these embodied capabilities from simulation to real-world deployment and continuously improve them through real-world feedback and human interaction?
Through this research, I aim to advance future transportation systems with enhanced safety, mobility, and efficiency, along with improved user trust and satisfaction, ultimately enabling a future where humans and robots coexist harmoniously.
Recent News View All
| Mar 20, 2025 |
|
🎉 We received Two NVIDIA Academic Grant Program Awards ($43,800 USD).
We received two NVIDIA grants for AI research in transportation - 20,000 A100 GPU hours for SafetyGPT and two RTX PRO 6000 Blackwell GPUs for EdgeTwin Project. Read more →
|
|---|---|---|
| Jan 12, 2025 |

|
👏 I attended the TRB 2025 Annual Meeting.
I participated in the Transportation Research Board (TRB) 104th Annual Meeting (January 7-11) at the Washington, D.C. Convention Center. We presented our work in multiple poster and lectern sessions, engaging... Read more →
|
| Jan 10, 2025 |
|
👏 I was invited to visit Google
I was invited to visit Google’s office in Washington DC on January 10, 2025. During the visit, I had the opportunity to meet with Google’s research team and discuss potential... Read more →
|
| Oct 18, 2024 |
|
🎉 Paper Traffic expertise meets residual RL: Knowledge-informed model-based residual reinforcement learning for CAV trajectory control is published on Communications in Transportation Research. |
| Sep 1, 2024 |
|
📢 We currently released one paper: Trustworthy Human-AI Collaboration: Reinforcement Learning with Human Feedback and Physics Knowledge for Safe Autonomous Driving. |
View All
- Preprint
 Sim2Real-AD: A Modular Sim-to-Real Framework for Deploying VLM-Guided Reinforcement Learning in Real-World Autonomous Driving 🔥arXiv preprint arXiv:2604.03497 (Preprint) , 2026
Sim2Real-AD: A Modular Sim-to-Real Framework for Deploying VLM-Guided Reinforcement Learning in Real-World Autonomous Driving 🔥arXiv preprint arXiv:2604.03497 (Preprint) , 2026 - Preprint
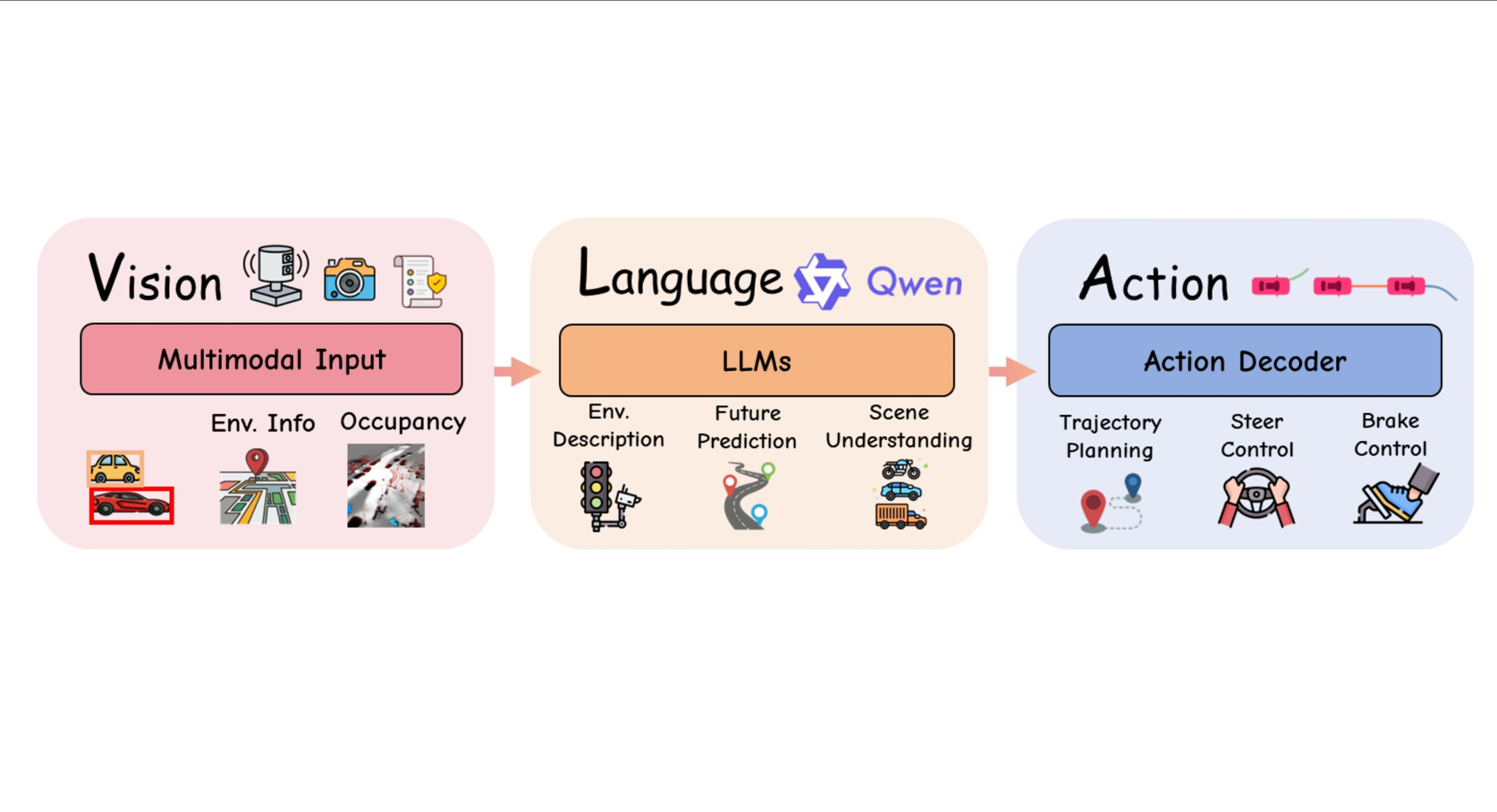
 DriveVLM-RL: Neuroscience-Inspired Reinforcement Learning with Vision-Language Models for Safe and Deployable Autonomous Driving 🔥arXiv preprint arXiv:2603.18315 (Preprint) , 2026
DriveVLM-RL: Neuroscience-Inspired Reinforcement Learning with Vision-Language Models for Safe and Deployable Autonomous Driving 🔥arXiv preprint arXiv:2603.18315 (Preprint) , 2026




{kind=link}